全方位榨干大疆MINISE
前言
我的无人机到手了,但是购买的是大疆MINI-SE,有些功能想用但是没有办法实现怎么办?我开启了榨干MINI之路。
基本榨干功能:全景模式,视觉跟踪,正射影像,倾斜摄影建模,航线规划,环绕摄影。
准备工作
如下是准备的基本工作,无人机型号同我或者以之上皆可,软件设备等同理。
- 无人机型号:大疆MINI-SE
- 手机设备:华为P30(HarmonyOS 2.0)
- 航点规划软件:Rainbow无人机控制飞行软件(V3.6)
- 电脑:Win10(20H2)
- 后期软件:Pix4Dmapper(V4.4.12),PS(CC 2018),AE(CC 2018)
全景模式
对于全景模式大疆支持是MINI2及以上才支持一键全景,而MINI-SE是不支持全景的,但是我们又很想要全景的效果,这个时候就需要手动全景合成了,两种方法:
注:此处全景模式特指的是球形全景
手动全景合成
关于手动全景合成可以看这个视频,【教程】Mini也能做全景图?,此处不做过多说明。
就我个人认为手动全景可以,但是工作量相对较大,而且不是很精准,我个人更推荐下面的软件合成+人工后期处理。
使用软件来合成
打开【Rainbow无人机控制飞行软件】,选择全景:

然后选择【全景设置】,在全景设置中,选择【球形】,在下面的参数中,将【全景清晰度】设置为【高】:


然后,点击左侧【开始】,等待无人机拍摄,结束完成后,点击【下载】,选择要合成的全景图,等待合成,一般要3-5分钟,因手机和图片质量以及合成参数而异。


下载完成后,可以在软件中浏览全景图片,如下为在软件中预览效果:
你会发现部分地方有些模糊,头顶更是黑了一片,关于模糊的部分是因为镜头拍摄的时候曝光问题,需要在拍摄的时候注意曝光,而头顶黑了一片是因为MINI-SE没办法拍摄头顶图片,这个时候就需要手动“补天”。如下图为软件初步合成的全景图片:

将图片使用PS来手动补天,补天后的图片输出如下,可以通过点我来预览,所有归属归山东农业大学所有,此处仅做演示说明,未经授权不可它用。

这样就基本实现了一张球形的全景图片,如果你想要纯手动制作一张全景图片或者希望分享给别人自己拍的全景图片,可以使用720云网站来制作和分享。
正射影像
什么是正射影像
正射影像顾名思义:即通过将无人机的云台成 -90° 方向(镜头正下方)来进行连续拍摄,保证一定的航向重叠率情况下,完成航线拍摄,然后通过后期软件来处理成一张航拍的地区正射影像。可以想象成地图的样子就是呈现结果。
开始航拍工作
首先找一个地方,选择一片需要正射影像的地方,此处示例以山东农业大学南校区正南门一片区域为正射影像为例,因为正射影像涉及航测方面的问题,所以示例会做模糊和水印处理。
我在早上大概7点20左右拍摄的正射影像,拍摄地区如下卫星图(高德地图):

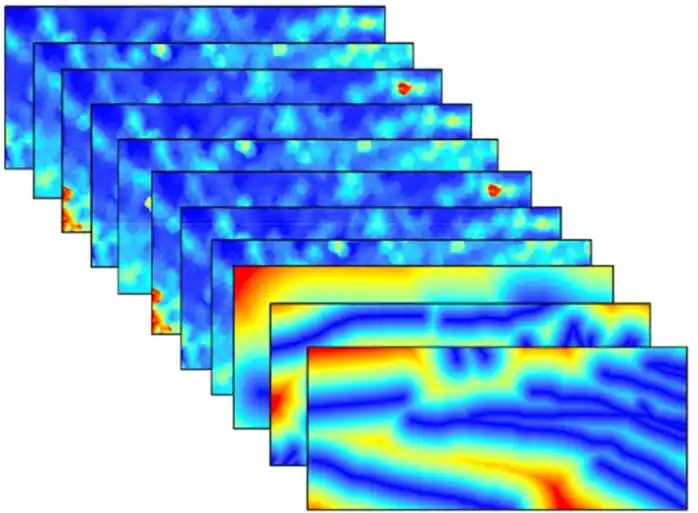
飞行航线如下图,具体飞行航线和航拍点是根据飞行高度,即航拍高度决定的。因为我的MINI-SE只有1200万的像素,所以我通过降低航拍飞行高度来让我的正射影像结果更清晰一些,同样的,随着航拍高度的降低航线和航点,拍摄的正射图片也会增加,也就是说正射完成的耗时更长。

我一共拍摄了130张正射影像,然后将图像导入到Pix4Dmapper软件中,进行处理,如果没有特殊需求,一路默认下去,然后在如下选择中选择第一个【3D Maps】,点击下一步即可,然后等待漫长解析。


解析完成后,会在相关的项目文件夹中生成相关文件以及质量报告,项目文件如下:

- 1_initial:包含质量报告和相关图像基本信息
- 2_densification:包含3D点云以及相关3D模型
- 3_dsm_ortho:包含正射影像文件和DSM文件等
- temp:临时文件(不需要管)
- Test.log:项目日志(不需要管)
在如下路径可以找到项目生成的质量报告:

在如下路径可以找到正射影像文件和DSM文件:


在如下路径可以找到生成的模型文件:

如下为我拍摄最后生成的正射影像和DSM图像,最终归属为山东农业大学,未经允许不可它用。

倾斜摄影
倾斜摄影和正射影像同理,也需要使用Pix4Dmapper,将相关倾斜摄影图片导入项目中,在遇到下列选项中选择【3D Models】,然后等待解析生成质量报告。

如下是我倾斜摄影的航线,我选择了很小的一块地方,所以相对图片和时间上少很多。可以看到,倾斜摄影会飞5条航线,分别是上下左右(东南西北)的倾斜摄影和一条中间的正射影像。

等待质量报告出来,解析完成后,在文件夹【1_initial】中可以找到质量报告,在文件夹【2_densification】中可以找到相关的3D模型。如下是相关模型的GIF:

因为大疆MINI-SE的像素只有1200万,所以可以尝试将飞行高度降低,来增加航点来提升最终模型质量。
视觉跟踪
因为大疆MINI-SE没有内置硬件图形加速相关,所以此处的视觉跟踪是基于软件的图像识别,使用Rainbow无人机控制软件,选择【视觉跟踪】,然后框选需要跟踪的对象,剩下的交给图像识别。


需要注意的是,因为是基于图像识别的,所以它对于控制的手机有一定的性能要求,当然你也可以在其设置中选择低精度识别,不过同理识别精度会差很多。另外还需要注意的是,这个功能更加建议在空旷的场景或者有人看着的情况下使用,因为大疆MINI-SE没有视觉避障,所以存在炸机的风险。
视觉跟踪效果如下:
环绕摄影
环绕摄影通俗理解就是无人机围绕某个点画圆,由于新手很难画出一个比较完整的圆形,又需要这个功能,这个时候就需要Rainbow无人机控制软件来使用【环绕】功能。

具体使用方法不多解释,举一反三。
END
最后的想法是可以利用无人机摄影+后期来实现如右侧的同款赛博朋克效果长安大学【赛博朋克】。看我有没有的时间来弄吧。就这样。